


产品分类

山东合运电气有限公司
手机:15588886921(同微信)
官网:www.nibiandianyuan.cn
邮箱:2466458158@qq.com
直流无刷电动机
时间:2022-11-15 人气: 来源:山东合运电气有限公司
无刷直流马达(英语:Brushless DC Motor)或称直流无刷电机或BLDC电机,是没有电刷和換向器的电动机,根据转子永久磁铁位置调整定子电流以产生转矩。虽然是称“直流”马达,但实际上是一种使用三相电的永磁同步电动机(PMSM)。之所以被称为“无刷直流电机”是因为在许多应用中该电机可以替换有刷直流电机。因此,BLDC电机也被称为EC(电子换向)电机,以便与包含电刷的机械换向电机进行区分。
BLDC电机利用电力电子技术(变频器)输入控制讯号到马达,以切换直流电的开关和通过的线圈组,而得到力矩使转子转动。但这些控制信号,波形没有限制。方波驱动的称为BLDC,用于位置要求不是很高的场合;正弦波驱动的称PMSM,用于伺服场合。
发展
早在1917年Boiiger就提出了用整流管代替有刷直流电机的机械电刷的想法。1955年,美国D.Harrison等人申请用晶体管换向线路代替有刷直流电机机械电刷的专利,标志着现代无刷电机的诞生。[3]
结构
较简单的结构是有一枚永久磁铁及至少两组(四个端子)线圈,两组线圈轮流开关。永久磁铁是转子,线圈是定子。当磁铁与线圈成一直线的时候,断开该组线圈,启动下一组线圈。
定子
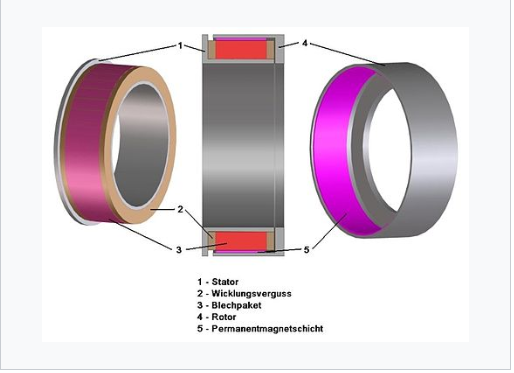
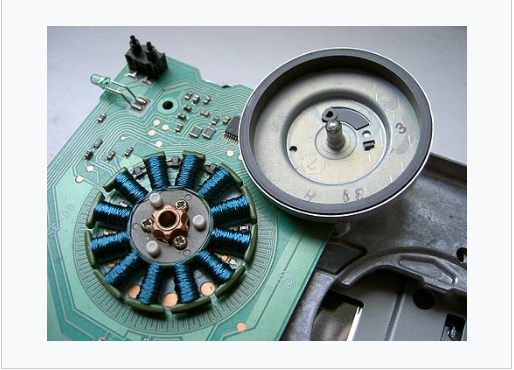
BLDC电机的定子与感应电机的定子相似,是由绝缘铸钢叠片组成,可以降低涡流的电流损失。多数BLDC电机都有三个星型连接的定子绕组,绕组置于沿内部圆周的轴向冲压槽中。直径小于40mm的电机会采用无齿槽设计:它的定子没有铁芯,铁损大幅减少,因此能效等级更高。
转子
转子用永磁体制成,转子里是没有线圈的。可有2到8对磁极,南磁极和北磁极交替排列。使用稀土合金磁体可以提高磁通密度,缩小转子体积。永磁体在转子上的安装方式多种多样:表贴式永磁(SPM)将永磁体装在转子铁芯外圆表面,通常见于高功率密度电机;表面嵌入式永磁(SIPM)电机的永磁体放在转子外表面的凹槽中,使得整个转子为圆柱形,提高了机械强度,防止永磁体在高速旋转时飞出;内置式永磁(IPM)转子结构的机械结构可靠,但安装工艺复杂,多用于高速电机。
类型
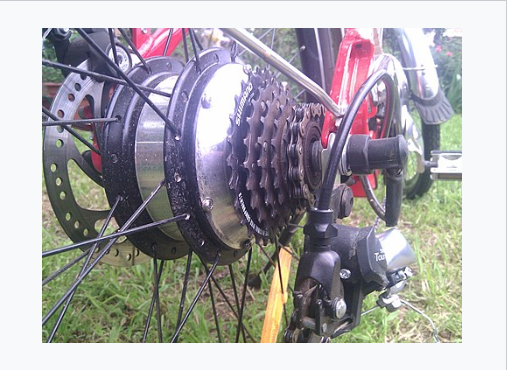
BLDC电机有内转子电机和外转子电机两种结构类型。内转子电机的优势在于转子的转动惯量低,散热非常快,在大多数工业应用中广泛使用。外转子电机的定子位于内侧,转子包括一个能够旋转外壳,磁体安装在外壳上,定子发热线圈与环境隔绝,散热相对较慢。由于转子的转动惯量转矩很大且很难控制转子外壳的平衡,所以外转子电机不适用于旋转速度很高的模式。但外转子电机可以拥有更短的结构并通常具备更小的停转转矩,而由于在相同的磁力下,它的转子直径更大,因此其转矩也更大。
外转子设计的永磁直流无刷马达
|
|
|
以定子绕组中线圈的互连方式分为梯形和正弦电机。采用集中整距绕组时,感应电动势为梯形波,称为永磁无刷直流电机(BLDC);分布绕组时,永磁转子形成正弦磁场,称为永磁同步电机(PMSM)。新型向量控制技术已对无刷直流电机使用正弦波控制,使得转矩波动和低速性能均有较大改善。正弦电机输出的转矩比梯形电机平滑,但因为绕组之间有额外的互连,从而增加了耗铜量。永磁无刷直流电机(梯形波)的功率密度比永磁同步电机(正弦波)大15%。
控制
在控制BLDC电机时,一般使用的是逆变器电路,例如脉冲宽度调制(PWM),通过调整脉冲占空比(ON/OFF)改变电压:若ON的比率较高,可以得到和提高电压相同的效果;若ON的比率下降,则可以得到和电压降低相同的效果。另外,BLDC电机的控制是配合着转子(永磁体)的位置(角度)进行的。因此,电机控制还需要获取转子位置。
霍尔传感器
多数BLDC电机在其非驱动端上的定子中嵌入了三个霍尔传感器(Hall sensor)。每当转子磁极经过霍尔传感器附近时,它们便会发出一个高电平或低电平信号,表示北磁极或南磁极正经过该传感器。根据这三个霍尔传感器信号的组合,就能决定换向的精确顺序。每次换向,都有一个绕组连到控制电源的正极,第二个绕组连到负极,第三个处于失电状态。六步换向定义了给绕组加电的顺序。通过控制通向线圈的电流方向和大小来控制转子的旋转。

从技术上来说,霍尔传感器和块换向组合是驱动BLDC电机的最简单方法。这种技术的劣势在于,由于切换过程不连续,在块换向中,会产生以此为峰值的转矩波动,其频率为电机电动旋转频率的六倍。这会引发振动和噪音;低速下尤其如此,电机不会始终均匀地旋转。通电的理想形式是正弦换向,永磁同步电动机(PMSM)的每个绕组都由一个120°正弦波供电,从而产生强度恒定并持续旋转的定子磁场。一般来说,对于精密控制合成磁通量的矢量控制,转角传感器(Angle Sensor)或光电编码器等高精度传感器较为有效。
位置检测专用传感器的种类及特征
电机类型传感器种类主要用途特征
BLDC霍尔效应传感器梯形波、120度通电控制每60度获取一次信号,价格较低,不耐热。
PMSM光电编码器正弦波控制、矢量控制分辨率高,但抗震性、防尘能力较弱,成本较高。
转角传感器正弦波控制、矢量控制分辨率高,适用于恶劣环境。
无传感器控制
BLDC电机可以通过监视反电动势信号,而不是霍尔传感器信号来换向。在既定电机磁通量和绕组数固定的情况下,反电动势的幅度与电机的旋转速度成正比。无传感器控制简化了电机结构(不需要附加绕组),节约了成本,但当电机处于静止状态时,无法获得转子位置,因而需要一种特殊的启动方法。当电机在控制模式下运转多个换向周期直到获得一定速度后,无传感器测量便能够确定转子位置。无传感器控制的BLDC电机适合安装在难以检修的位置,或在多灰尘、多油的环境中运行,但不适合需要较低速度的应用,因为此时反电机势很小而难以测量,会造成工作效率不高。
无传感器BLDC电机的控制系统由一个MCU控制芯片加上一个IGBT或MOSFET驱动器组成[,外设器件有三相PWM、ADC和用于过流保护的比较器。
电动机标量控制和矢量控制的比较
控制参数V/Hz控制矢量控制无传感器矢量控制
速度调节1%0.001%0.05%
转矩调节差±2%±5%
电机模型不要求要求要求精确的模型
MCU处理功率低高高+DSP
特性
BLDC电机的转矩在达到额定值之前都保持不变。电机可达最大转速是额定转速的150%,但从超过额定转速起转矩开始下降。
与传统有刷式直流电动机相比,无刷式较为安全和可靠。碳刷长期使用有碳粉,高温环境下,碳粉可能会爆炸。因此,需要定期清理,同时保养成本较高。但同样的去除电刷需要使用电子技术,不是透过简单改变电压就能控制定子的转动了。
BLDC电机与感应电机比较
特性BLDC交流感应电机
转速/转矩特性特性曲线平坦,在负载额定的条件,可在所有转速下正常工作。特性曲线非线性,低转速下转矩也低。
输出功率/体积功率密度高,由于转子采用永磁体,体积较小功率密度中等,由于定子和转子都有绕组,输出功率与体积之比低于BLDC。
转子惯性惯性小,动态特性较佳惯性大,动态特性较差
起动电流额定值,无需专门的启动电路。大约是额定值的7倍,应谨慎选择合适的启动电路。通常使用星型-三角形启动器。
控制要求要保持电机运转,始终需要控制器。还可使用这一控制器控制转速。固定转速不需要控制器,只有需要改变转速时才需要控制器。
差频定子和转子磁场的频率相等转子运行频率低于定子磁场。差频随着电机负载的增大而增加。
应用
恒定负载
如风扇、泵、吹风机这类应用需要低成本控制器,多数运行在开环状态。
变化负载
家用电器中的洗衣机、干衣机、压缩机,汽车上的燃料泵、电子转向、引擎控制,航空航天领域中的离心机、机械臂、陀螺仪控制等可能使用转速反馈设备,运行在半闭环或全闭环状态。这些应用使用高级控制算法,从而增加了控制器的复杂性,提高了整个系统的造价。
定位应用
机械齿轮或定时传送带等应用中转速和转矩的动态响应很重要,并且可能需要频繁切换转向。可能需要有三个控制环同时工作:转矩控制环、转速控制环和位置控制环。
关于直流无刷电动机,小编为大家就分享这些。欢迎联系我们合运电气有限公司,以获取更多相关知识。
下一篇:直流电动机







 鲁公网安备 37010502001687号
鲁公网安备 37010502001687号


